API Introduces Next-Generation Optical CMM for Automated Non-Contact Inspection
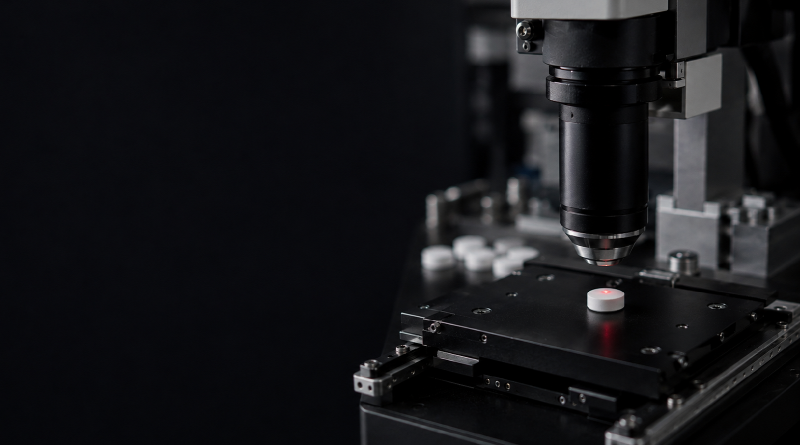
Automated Precision Inc. (API) has introduced the next generation of Optical CMM. The automated, non-contact inspection system is designed to deliver high-precision dimensional measurement for both inline, nearline and standalone inspection applications.
Read Article →