
Metrology Drives Robotic Aerostructure Drilling Solution
Many readers will be familiar with seeing fields of industrial robots, in automotive assembly plants, producing vehicle structures with smart tools such as spot-welding guns and riveting systems. A UK start-up, True Position Robotics (TPR) has a vision to transform aero-structure manufacturing by developing smart robot drilling and inspection tools to become the aerospace equivalent of automotive automation over the next few years.
A key step in that process has recently been completed through an Aerospace Technology Institute program / Innovate UK grant funded project named Automated Drilling and Inspection (ADI). Technical and commercial oversight was generously given from AIRBUS, BAE Systems, GKN Aerospace and FANUC UK.

The project has delivered a £500K robotic drilling and inspection solution producing holes to a positional accuracy of 0.254mm with 99% confidence. This opens a completely new market, where to-date, robotic aerostructure systems have been unaffordable for smaller structures at the tolerances required. The delivered system is at T 6 (Technology Readiness Level).
Note: TRL is a scale from 1-9, originally developed by NASA and widely used in aerospace with 6 being the highest pre-production level.
There were three main work packages associated with the project – Drilling, Inspection and Digital Thread.
Drilling
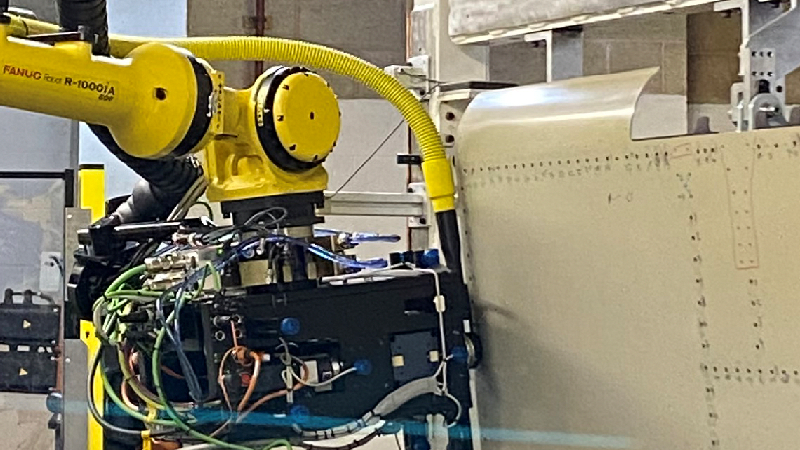
TPR has developed a lightweight robotic drilling system for one-shot drilling and countersinking of holes up to 10mm in diameter. It uses a new TPR patented clamp-up system to achieve countersink depth control, and positional control achieved through an advanced robot guidance system including machine learning. The guidance is via an optical metrology system delivering an absolute digital twin to 0.1mm.
The clamp-up system is designed as a modular attachment to any 3rd party drilling tools and is currently being tested through a larger tool developed by FANUC UK, with a much larger hole-size capability.
Two ‘green’ benefits from this solution are the robot payload is significantly lower than current solutions on the market – requiring only half the robot energy to operate. The second, with the guidance system, prevents a hole ever being drilled in the wrong location – meaning it’s a ‘no waste’ solution.
Enterprise informatics are supplied through an integration with ProLink QC-Calc giving full statistical process control without requiring post-process validation.

Inspection
By having robot guidance, an optical tracker was already part of the delivered solution with the scanner head becoming an accessory to generate additional informatics. A Creaform MetraScan was used, with full robotic auto-tool change developed by TPR, using Staubli technology. (Note: TPR is an approved Creaform robotic systems integration partner with the robot tool changing developed independently by TPR)
Reporting is through Polyworks Inspect. TPR has developed a unique and advanced scripting language that connects the robot, metrology system, and analysis software seamlessly together (Robotic Software Hub – RSH).
The scanner was used widely throughout the build; not just as a validation tool but integrated within the build philosophy.

Digital Thread
TPR used ‘Process Simulate’ to create all the robot programs off-line; supported by SimSol. For the metrology Polyworks Inspect was used with Geometric Dimensioning and Tolerance guidance from Seize-a-Solutions Ltd. It became clear there were significant benefits from taking knowledge from across the enterprise – rather than operating in technology silos.

Siemens became an active supporter of the project, in particular their Tecnomatix team. TPR learnt new 3D CAD modules in concept design, assembly and metrology – supported by local VAR OnePLM. It also demonstrated a novel enterprise-wide metrology solution called ‘Polyworks Collaborative Suite’ supported by local reseller 3D Scanners UK. This has an intelligent interface to 3D CAD to automate measurement plan creation. Through a webserver, the plans are passed to and from the robot cell, with results held on the database and exposed to the whole organization allowing review of how an actual build is performing to learn and improve on locator and tolerancing strategies.
The ‘Digital Thread’ is only partly realized virtually, with significant effort (and benefits) in the shop-floor side of the integrated workflows. By connecting virtual with physical elements, using smart templates increased the ability to create the robot part programs and PLC recipes off-line ensure clear data communication throughout with no manual editing.
With the Automated Drilling and Inspection solution TPR demonstrated the full workflow on IP-free coupons and is now looking to share knowledge of the set-up commercially.
The method aligns with partners goals to build a virtual manufacturing landscape and demonstrates multi-vendor connectivity – consistent with Industry 4.0.
“The biggest benefit was perhaps the productivity gains by removing duplication and having clear data sources and destination. The calculated financial benefits on TRL 6 alone were greater than the cost of a spare drill or laser scanner. Return On Investment (ROI) can be viewed in a new light; it’s not replacing manual work with robots; the capital expense is almost ‘free’ if the digital landscape is well architected – and appropriate training given. This can only help future robotic assembly adoption” states True Position Robotics Director Roger Holden. “With the Automated Drilling and Inspection solution TPR demonstrated the full workflow on IP-free coupons we are now looking to share knowledge of the set-up commercially.”
“On a final point, a significant amount of work was made in proving the numbers generated are indeed correct. I’d like to thank GemDT/Inora on support with neutral artefacts (tetrahedron with 6-off 1m lengths calibrated to 1 with 8m uncertainty), and Creaform and Measurement Solutions for supporting multi-tracker tests on volumetric accuracy; the result being the published capability is correct, but it’s not plug & play – rules need to be well followed” further added Holden.
For more information: www.tpr.solutions



