
Robotic Image Processing Tools Automate Aircraft Surface Preparation
During the Automate 2022 exhibition in Detroit, Southwest Research Institute introduced new automation technology that allows industrial robots to visually classify work and autonomously perform tasks.
SwRI’s Automate booth featured an interactive demonstration of robots autonomously sanding and preparing surfaces on aircraft and other machinery. The technology can be applied to grinding, painting, polishing, cleaning, welding, sealing and other industrial processes.
“Our solutions increase process repeatability while improving part quality and decreasing rework,” said Matt Robinson, a robotics R&D manager at SwRI. “They also reduce human exposure to dangerous environments.”
The system uses SwRI-developed machine learning algorithms and classification software that work in conjunction with open-source tools such as Scan-N-Plan and ROS 2, the latest version of the open-source robot operation system. Traditional robot programming can be slow and tedious, requiring an expert in the loop with knowledge of computer aided design (CAD).
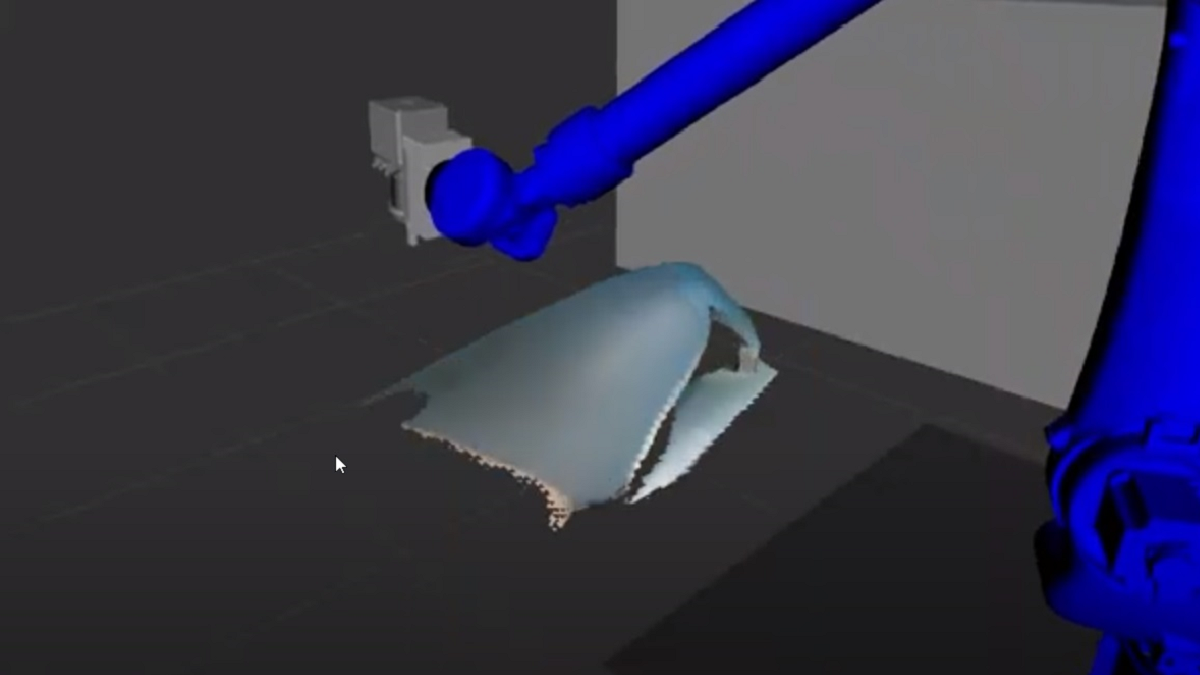
Scan-N-Plan, a ROS-Industrial technology, uses machine vision to scan parts, creating 3D mesh data that robots use to plan tool paths and process trajectories while performing real-time process monitoring. SwRI works closely with the ROS-I project to maintain its software repository and expand open-source automation solutions.
“By leveraging these open-source tools with our custom software, we have developed a solution that intelligently classifies regions and textures of part surfaces in various stages of work,” Robinson said.
The solution includes custom machine vision algorithms that enable robots to apply various media with varying pressure based on the amount of surface work needed. Feature-based processing is also enabled through additions that leverage semantic segmentation approaches to apply the right tool to the right feature, cutting versus sanding for instance.
“These are breakthroughs that will help prevent robots from over-sanding or over-grinding metal surfaces,” said Paul Evans, director of SwRI’s Manufacturing Technologies Department. “It is exciting to leverage the open-source community with our custom robotics engineering.”
This project demonstrates the advanced features of ROS 2 while providing an initial framework for additional application build-out. It is also an open-source example for teaching and training those interested in developing advanced solutions that leverage ROS.
“SwRI is excited to be providing proven solutions that leverage this framework to the commercial and government industrial client base, across a broad array of applications, for both stationary cell-based systems and mobile solutions,” added Robinson.
SwRI also shared a new industrial reconstruction framework that creates high-fidelity mesh maps of objects. An onboard camera overlays the map to create a colorized mesh to facilitate advanced processing. The combination of 2D, 3D and color classification drives more intelligent processing. This new capability will be made available via the ROS-Industrial open-source program.
For more information: www.swri.org


