
Robotic Automated Fixture System Eliminates Clamping
At the Recent CONTROL 2023 exhibition Metrology News was introduced to the Poly Robot Automated Fixture System (PRAFS) from PROTOS-3D, a fully flexible part fixturing system used in conjunction with virtual clamping software. The desire to replace mechanical clamping devices becomes reality with PRAFS + Virtual Clamping.
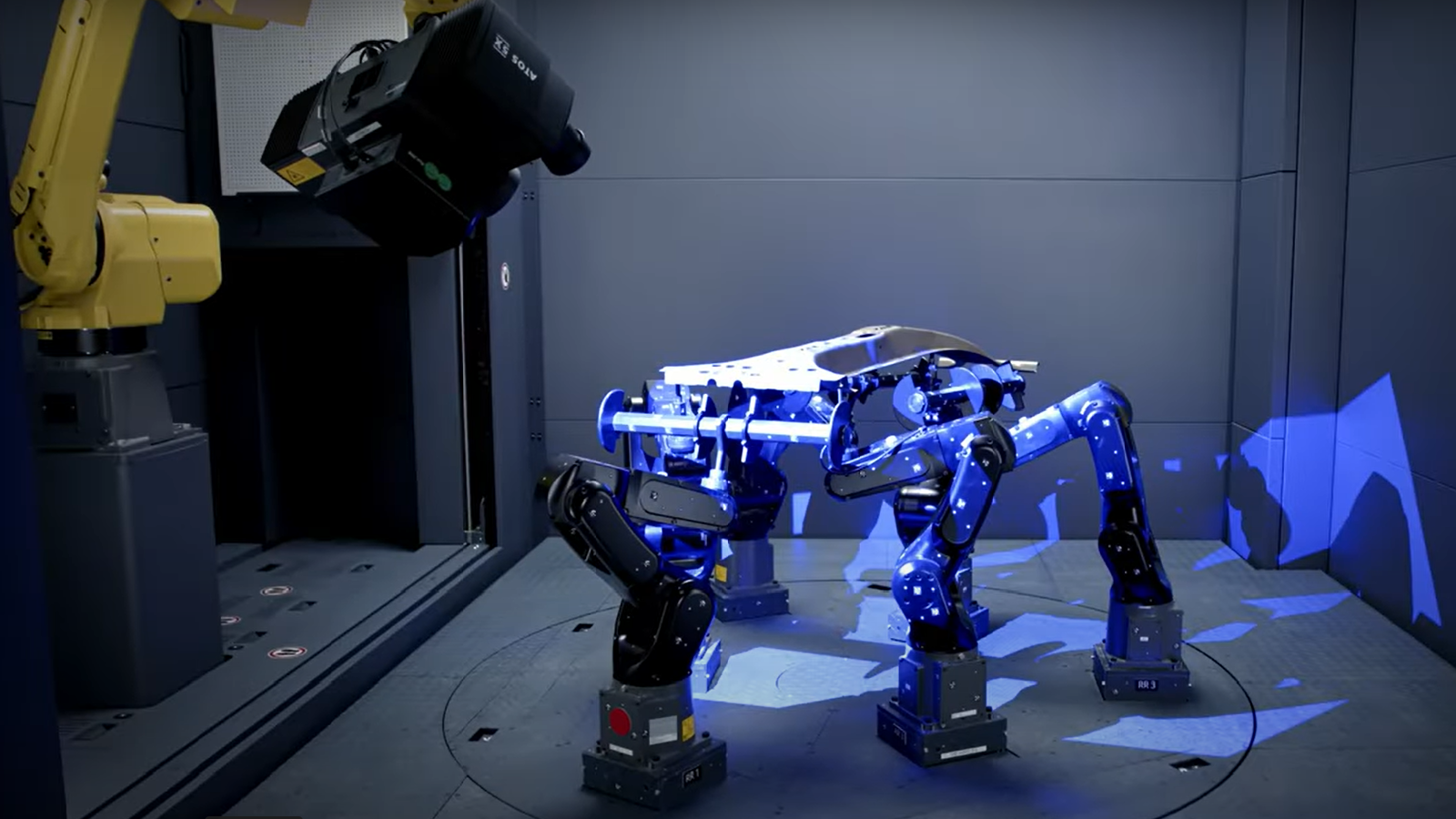
With the fully flexible PRAFS system thousands of different component parts can be located with repeatable accuracy and all-round accessibility. The component is always placed horizontally. Changing components only takes a few seconds with no mechanical adaptation and all measurements are automated.

 Conventional, mechanical clamping systems are mainly manufactured of steel or aluminum. Virtual Clamping (VC) makes these clamping systems superfluous. Virtual Clamping based on the PRAFS universally pneumatic holding device can be fully integrated into a ZEISS ScanBox. The algorithms of the ZEISS software GOM Inspect Pro combined, with an FEM data set of the corresponding component, enable the virtual clamping of sheet metal, die-cast or plastic components.
Conventional, mechanical clamping systems are mainly manufactured of steel or aluminum. Virtual Clamping (VC) makes these clamping systems superfluous. Virtual Clamping based on the PRAFS universally pneumatic holding device can be fully integrated into a ZEISS ScanBox. The algorithms of the ZEISS software GOM Inspect Pro combined, with an FEM data set of the corresponding component, enable the virtual clamping of sheet metal, die-cast or plastic components.
 A large number of different components are held with just one pneumatic device. Component sizes from 300 mm to 2,000 mm are possible. The parts are placed on the PRAFS manually or automatically. Additional part-specific contact and clamping elements are not required eliminating the costs for further component-specific devices and the operator influence is enormously reduced. The measuring system decides whether photogrammetry or calibration is to be carried out and initiates the sequence automatically.
A large number of different components are held with just one pneumatic device. Component sizes from 300 mm to 2,000 mm are possible. The parts are placed on the PRAFS manually or automatically. Additional part-specific contact and clamping elements are not required eliminating the costs for further component-specific devices and the operator influence is enormously reduced. The measuring system decides whether photogrammetry or calibration is to be carried out and initiates the sequence automatically.
 The PRAFS-EMUSIM software is the central link between PRAFS-HMI and the ZEISS software. The PRAFS-EMUSIM is a virtual PRAFS clone through which the PRAFS robots can be planned, stored and managed offline. The software enables simple and intuitive programming of the PRAFS elements replacing traditional mechanical clamping devices. A measurement technician who previously prepared the programs for the measurement process on the ScanBox can program the PRAFS robots using drag & drop. No special robot or programming knowledge is required.
The PRAFS-EMUSIM software is the central link between PRAFS-HMI and the ZEISS software. The PRAFS-EMUSIM is a virtual PRAFS clone through which the PRAFS robots can be planned, stored and managed offline. The software enables simple and intuitive programming of the PRAFS elements replacing traditional mechanical clamping devices. A measurement technician who previously prepared the programs for the measurement process on the ScanBox can program the PRAFS robots using drag & drop. No special robot or programming knowledge is required.
When a robot is positioned, the associated travel positions are programmed at the same time and the end position can be reached without collision. The PRAFS structure is transferred to the PRAFS-HMI on the ZEISS ScanBox, where it is called up and validated. After validation, the setup can be used immediately.
For more information:www.protos-3d.de


