
Photoneo Introduces New Solution For Fast 3D Robotic Picking
Photoneo has introduced a new tool for fast picking of oriented and semi-oriented parts in collision-free environments – the Locator Studio.
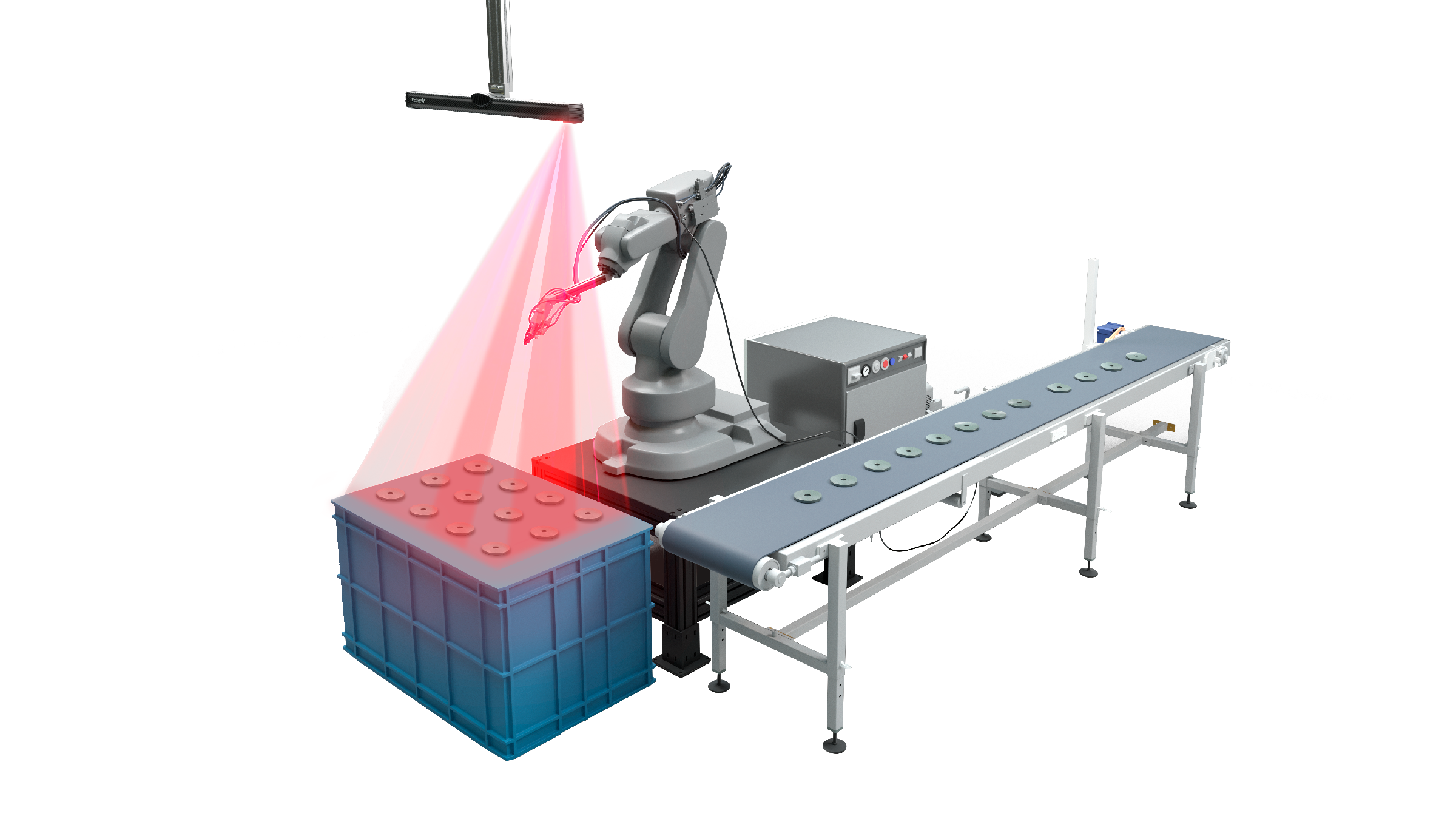
The most common use cases include object picking from flat surfaces such as trays, conveyor belts, and racks or part localization for precise placement, screwing, and assembly. The new solution offers exceptionally fast localization and picking speed, easy calibration and configuration, and support of all major robotic brands and manipulators.
Robotic picking of parts is one of the most common and crucial applications in vision-guided robotics. The picking of objects from a bin is often referred to as the key challenge in computer vision and robotics, or the “holy grail in sight”, due to the sheer complexities involved. These challenges have been solved by Photoneo Bin Picking Studio. However, not all applications require such complex bin picking solutions that necessitate precise path planning to avoid collisions and which can only be operated with a special skill set. Sometimes, customers need to pick objects from flat surfaces such as trays, shallow bins, conveyor belts, or racks, where there is no risk of collision. Similarly, simple delayering, destacking, or the localization of parts for assembly, screwing, and other applications requiring precise object placement do not require path planning.
Photoneo identified an intense demand for a solution that would be tailored for simple applications and which would provide faster picking speed than traditional bin picking systems. “We recognized a huge gap among solutions for robotic picking of objects. While there is a pretty high number of complex software solutions for challenging applications such as bin picking, a simple system for fast object localization and collision-free picking was missing. Therefore, we developed Locator Studio – a truly entry-level solution for anyone who wants to do simple 3D picking at an exceptionally fast speed. Because the CAD-based object localization uses the same principles as conventional bin picking technologies, it does not require any special knowledge or new programming language skills.” said Jozef Veres, Sales Director of Automation at
Photoneo.
Locator Studio is a complete set for simple 3D picking applications that comprises a Photoneo 3D sensor, object localization and picking software, and a vision controller. This combination provides the following key benefits:
➤ Simple & fast 3D picking in collision-free environments: Locator Studio allows for fast picking of oriented and semi-oriented parts in collision-free environments. The robot can approach objects without the need for advanced path planning with collision avoidance.
➤ Fast scanning speed & superior quality of 3D point clouds: Locator Studio is compatible with PhoXi 3D Scanners as well as MotionCam-3D providing an exceptional resolution, submillimeter accuracy, and a scanning range from 161 up to 3780 mm.
➤ Easy calibration and configuration via the web interface: Locator Studio supports multiple vision systems, which can be fixed mounted above the scene or attached to the robotic arm. Object localization is based on the same principles as conventional technologies so it does not require any special knowledge or new programming language skills.
➤ Robust CAD-based object localization; The localization of multiple objects and their pose estimation in X, Y, and Z (6-DOF pose)
happens in a single scan while the robot picks the previous round of parts. Users can switch between solutions to search for different parts.
➤ Fast integration with an arbitrary robot system: The tool supports all major robotic brands and industrial manipulators due to an open and documented TCP/IP protocol. The TCP/IP interface enables communication via any middleman, including an arbitrary robotic controller, PC with custom setups, or PLC.
For more information: www.photoneo.com

