
Camera-Based Angle Sensors Provide Robot Independent Accuracy
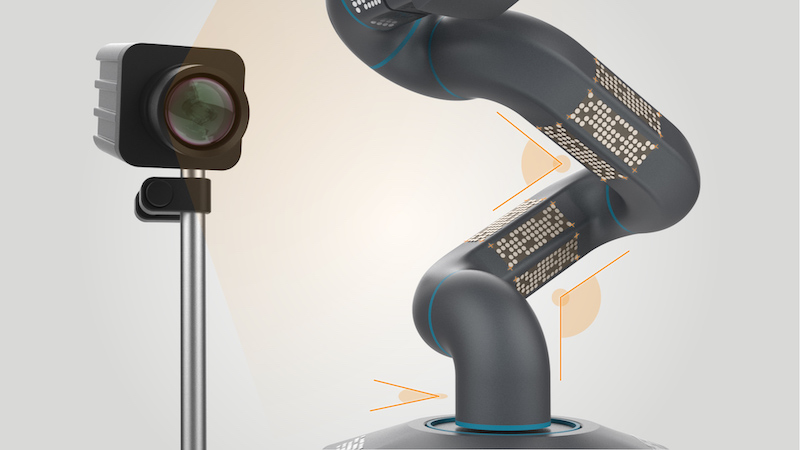
Visevi Robotics has introduced ViseJoint, a virtual sensor based on machine vision that measures angular positions of robot joints (virtual encoder). All axes of a robot arm are measured simply by looking at them with cameras. Positioning and control of robot arms works purely camera-based, even a robot arm without any hardware encoders is possible to control.
ViseJoint enables sensorless robot arms, relying only on the external camera. With external sensing, the true position of the arm is always known ensuring gear backlash, links bending or imprecise mounting no longer disturb robot positioning accuracy.
It can be connected to most standard cameras and provides angular measurements for all observed joints. User only needs to attach textured markers to the robot joints. The accuracy of the system is stated as 0.05° for stationary joints and 0.5° for moving joints.
ViseJoint relies on one or several standard cameras next to the robot arm. Smart service robots already use cameras for navigation, pose estimation or object/face detection. Now, those existing cameras are co-used for angular sensing. All data derived from the camera is naturally coherent, ensuring minimal relative positioning errors.
Visevi Robotics GmbH is a startup company, located in Munich Germany, focussing on computer vision products for sensing and for grasping on smart robots. The patented technology of camera-based sensing is available for tactile data, force-torque and joint angles and has been developed with the Technical University of Munich.
For more information: www.visevi.com


