February 2026 Metrology News Magazine
As manufacturing continues its rapid transformation toward smarter, more connected production environments, robotics is redefining what quality control looks like on the factory floor.
Read Article →

As manufacturing continues its rapid transformation toward smarter, more connected production environments, robotics is redefining what quality control looks like on the factory floor.
Read Article →
Chinese home appliance giant Midea Group has introduced a striking new entrant into the industrial robotics landscape: the MIRO U. Unlike the growing wave of humanoid robots designed to mimic human form, MIRO U takes a radically different path.
Read Article →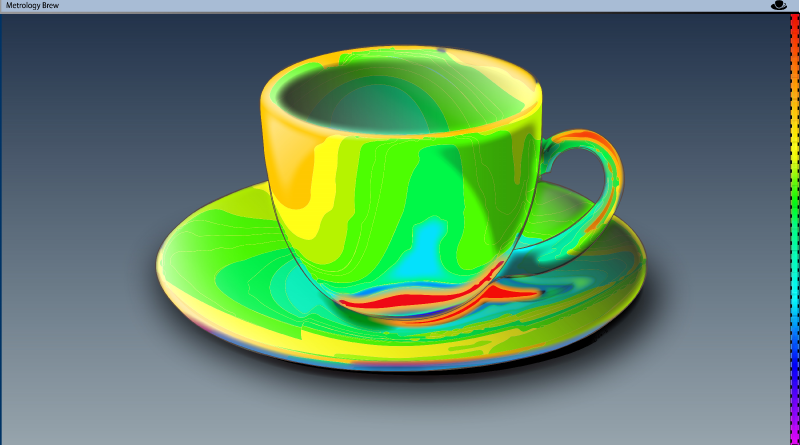
Metrology Brew newsletter features a summary of headline metrology and smart manufacturing news from the past 7 days.
Read Article →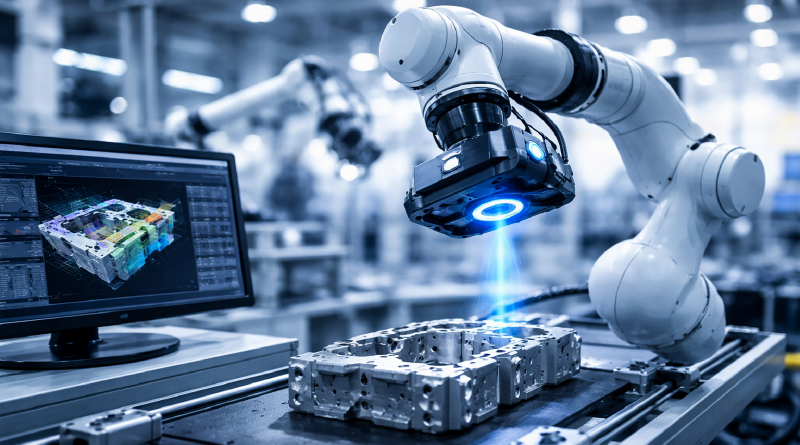
Machine vision has moved far beyond its early role as a digital replacement for human inspection. Today, it is becoming a core enabler of robotic intelligence, giving automated systems the contextual awareness, adaptability, and measurement capability required for high-mix, high-precision manufacturing.
Read Article →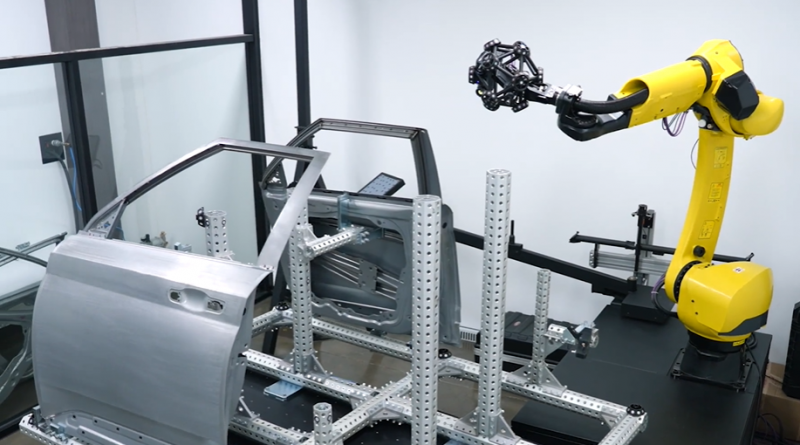
To maintain quality and support its role as a trusted Tier-1 supplier to the Hyundai Motor Group, Ajin Industrial needed a faster and more repeatable measurement method.
Read Article →
Metrology Brew newsletter features a summary of headline metrology and smart manufacturing news from the past 7 days.
Read Article →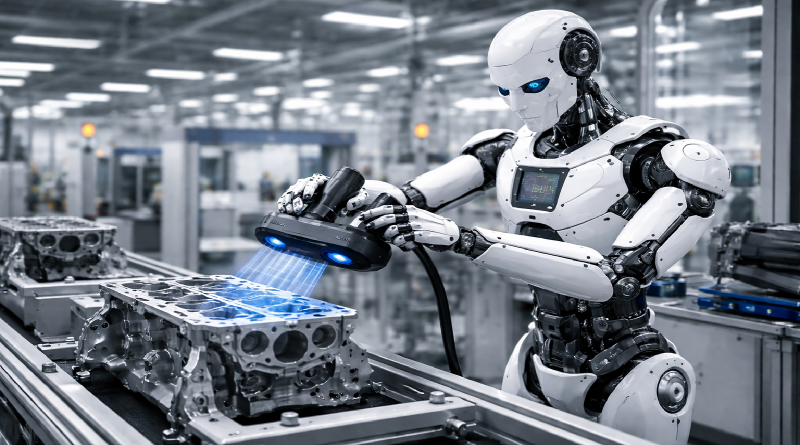
As the smart factory model matures, one of the most intriguing new participants entering the production floor is the humanoid robot. Far from being futuristic curiosities, these human-shaped, AI-enabled robotic systems are emerging as potential enablers of a more connected, adaptive approach to metrology.
Read Article →
Manufacturing is evolving faster than ever, driven by digital transformation, automation, and rising expectations for precision, speed, and traceability. At the heart of this transformation lies metrology – quietly but decisively shaping how quality is defined, measured, and delivered.
Read Article →For decades, metrology software has focused on one core task: accurately measuring parts and reporting deviations against nominal values. While automation, CAD integration, and digital reporting have steadily improved efficiency, the responsibility for interpreting results and deciding next actions has largely remained with human experts.
Read Article →
In an automotive sector undergoing rapid change, quality must represent a true commitment to customers. Renault Group has made it one of its key drivers of transformation and has rolled out a fast-paced methodological and cultural revolution: factory digitalization, quality runs, industrial metaverse, real-time responsiveness.
Read Article →