

AI-Trained Robotic ‘Mice’ Set to Inspect the Large Hadron Collider
A new generation of ultra-compact inspection robots developed jointly by the UK Atomic Energy Authority (UKAEA) and CERN could soon be ‘scurrying’ through the internal beamlines of the Large Hadron Collider (LHC), providing a powerful new tool for monitoring the world’s most complex particle accelerator.
 The autonomous robots, named PipeINEER, are designed to navigate extremely narrow beamline pipes inside the 27-kilometre collider to detect potential faults before they interrupt experiments. The collaboration between the two organisations has already been recognised by the engineering community, receiving a Highly Commended distinction at the Collaborate to Innovate Awards organised by The Engineer.
The autonomous robots, named PipeINEER, are designed to navigate extremely narrow beamline pipes inside the 27-kilometre collider to detect potential faults before they interrupt experiments. The collaboration between the two organisations has already been recognised by the engineering community, receiving a Highly Commended distinction at the Collaborate to Innovate Awards organised by The Engineer.
For metrology and inspection professionals, the project illustrates how robotics, AI-driven image analysis, and remote sensing technologies are converging to solve inspection challenges in environments that are effectively inaccessible to humans.
Inspecting the World’s Most Powerful Particle Accelerator
Located near Geneva on the French-Swiss border, the LHC accelerates particles to nearly the speed of light to explore the fundamental structure of matter. The machine is central to some of the most significant discoveries in modern physics, including the confirmation of the Higgs boson.
 Inside the collider, particles travel through beamlines maintained under ultra-high vacuum and surrounded by superconducting magnets operating at approximately –271 °C, just above absolute zero. These conditions enable precise particle acceleration but create formidable challenges for inspection and maintenance.
Inside the collider, particles travel through beamlines maintained under ultra-high vacuum and surrounded by superconducting magnets operating at approximately –271 °C, just above absolute zero. These conditions enable precise particle acceleration but create formidable challenges for inspection and maintenance.
The LHC contains roughly 2,000 Plug-In Modules (PIMs) within its beamline infrastructure. These modules incorporate delicate components such as radio-frequency (RF) fingers, which maintain electrical continuity along the beam pipe. Over time, repeated thermal cycling can cause these thin metal contacts to deform slightly.
Even microscopic distortions can protrude into the beam path. In a system operating with sub-millimetre tolerances, such changes may obstruct particle beams, potentially disrupting experiments and requiring complex maintenance interventions.
Traditional inspection methods rely on manual endoscopic tools, which often require partial disassembly of the beamline—an extremely time-consuming and costly process in a facility of this scale.
A Mouse-Sized Robot for a Massive Infrastructure
To address these constraints, CERN partnered with Remote Applications in Challenging Environments (RACE), the robotics centre of the UKAEA. RACE specialises in robotic systems designed for hazardous environments, including nuclear facilities, fusion reactors and space structures.
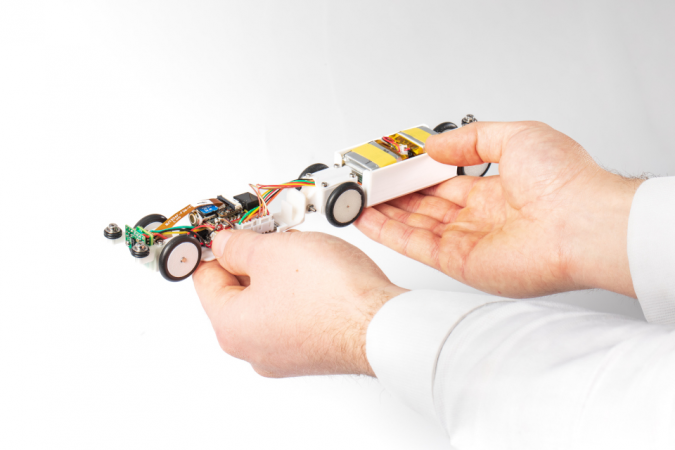
The resulting solution is PipeINEER, a robot measuring just 20 cm in length and capable of navigating spaces only 3.7 cm by 3.7 cm wide.
Despite its tiny dimensions, the robot is engineered for extended missions. Operating autonomously, it can travel up to six kilometres on a single battery charge, the equivalent of traversing roughly 60 football pitches end-to-end, while capturing detailed images of the beamline components.
This capability represents a significant step forward compared with traditional pipe inspection technologies, which typically require tethered systems or frequent retrieval.
AI-Driven Inspection and Autonomous Operation
A key feature of PipeINEER is its AI-assisted inspection capability. As the robot travels through the beamline, onboard cameras capture high-resolution imagery of the Plug-In Modules and surrounding components.
Machine-learning algorithms trained on real LHC imagery analyse these images to identify anomalies such as:
- Bent or displaced RF fingers
- Surface deformation or obstruction
- Foreign objects or contamination within the beamline
If the system detects a potential issue, the robot autonomously returns to its entry point and reports the precise location of the anomaly.
This targeted information allows engineers to focus maintenance efforts on specific sections of the collider rather than dismantling large areas of beamline infrastructure. The result is faster troubleshooting, reduced downtime and lower operational costs.
The robot also incorporates energy-efficient electronics and multiple safety systems, ensuring reliable performance during extended autonomous missions in confined environments.
Robotics Expertise from Fusion Energy
For UKAEA, the project builds directly on robotics expertise developed for future fusion energy facilities.
Nick Sykes, Director of RACE at the UK Atomic Energy Authority, emphasised the importance of cross-disciplinary collaboration:
“This award highlights the power of international collaboration, bringing together UKAEA and CERN alongside the wider global scientific community. We’re proud to apply our robotics expertise from fusion energy to support CERN’s world-leading experiments. By combining our remote handling experience with CERN’s scientific excellence, we’re helping ensure the Large Hadron Collider operates safely and efficiently for years to come.”
Dr Giuseppe Bregliozzi, Beam Vacuum Operation Section Leader at CERN, added that the technology could fundamentally change maintenance procedures for the collider:
“PipeINEER will transform how we inspect and maintain the LHC. It marks a major step forward in keeping our experiments running smoothly.”
Testing and Deployment Timeline
The PipeINEER robots are currently in the development phase, with extensive operational testing planned throughout 2026. During this phase, the robots will undergo more than 60 km of cumulative testing, validating their endurance, autonomy and inspection capabilities.
Once operational, PipeINEER could become a routine inspection tool for the accelerator, reducing maintenance downtime and enabling more continuous scientific operation.
Although developed for high-energy physics infrastructure, the PipeINEER project highlights broader trends relevant to the metrology and inspection sector. The PipeINEER project demonstrates how innovations developed for frontier science facilities can ultimately influence inspection technologies across multiple industrial sectors – turning a mouse-sized robot into a powerful tool for maintaining some of the world’s most complex machines.






